Impresora 3D - Electrónica
1. Componentes y Características
FIRMWARE
Antes de comenzar con la descripción de la electrónica de la impresora, vamos a hablar del Firmware necesario para que todo funcione perfectamente. El firmware es el software que vamos a dejar residente (grabado) en nuestra placa microcontroladora (en general Arduino Mega2560) y que sera el encargado de controlar todo el funcionamiento de nuestra impresora, desde gestionar la información del archivo de nuestro modelo 3D, hasta proporcionarnos toda la información del proceso de impresión, pasando por el sistema de control de temperatura del hot end y la cama caliente
Existen diferentes firmwares para controlar la impresora, aunque en general, se utilizan dos de ellos, Sprinter (cada vez menos) y el Marlin (el mas difundido) .
Esta entrada tiene como objetivo que todos sepan acerca de la existencia y el sentido del firmware, sin embargo, deben tener en cuenta que la modificación, instalación y configuración del mismo debe realizarla alguien con experiencia en esta área.
https://github.com/kliment/Sprinter
COMPONENTES ELECTRÓNICOS DE NUESTRAS IMPRESORAS 3D
Excepto algunos casos, la gran mayoría de las impresoras 3D tienen en común la electrónica de control. Esto se debe a que el desarrollo de la misma ha sido posible gracias al advenimiento del proyecto arduino. Cuya placa Mega 2560 es el corazón y cerebro del control de estos equipos. Hay muchas impresoras que no usan directamente una placa arduino, sino un clon de la misma fabricado a la medida de cada empresa (caso Weedo F192). En el siguiente video veremos una descripción de la misma, y a continuación haremos un breve descripción de cada componente.
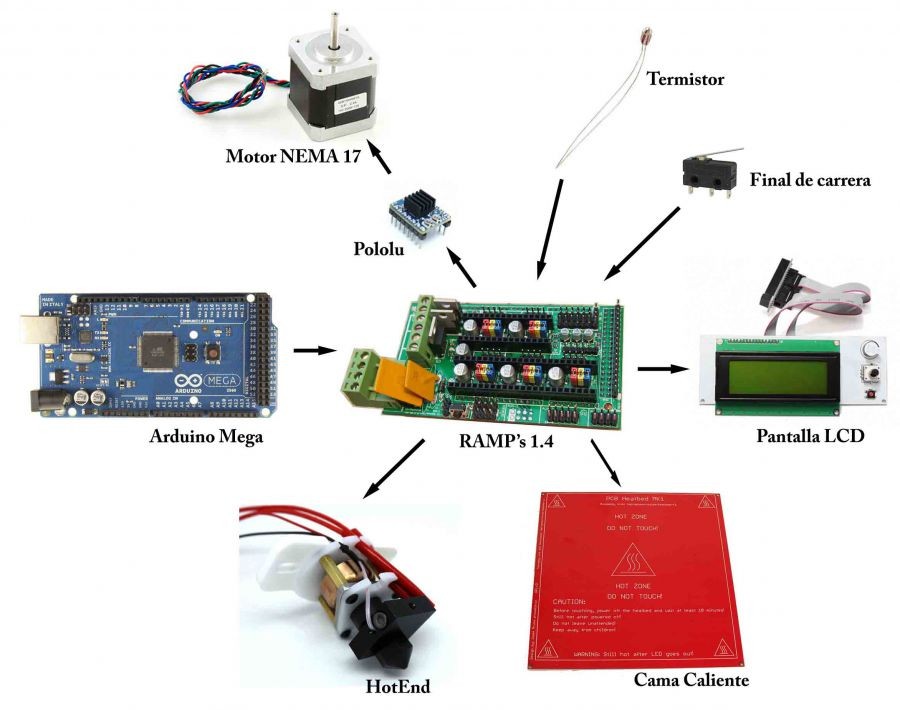
Electrónica (partes)
En las siguientes imágenes pueden ver un esquema general para que tengan una idea de los elementos que componen la impresora.
Placa de control o Motherboard (Arduino Mega 2560)
Arduino va a ser la placa que controle todos los procesos de la impresora, en este caso se emplea un Arduino Mega 2560, ya que tanto por la extensión del programa que se le carga, como por la gran cantidad de entradas / salidas que necesitamos, esto no se podría hacer con otra placa Arduino mas pequeña.

La placa Arduino puede funcionar de dos maneras, recibiendo y ejecutando la información que le llega directamente de la computadora a través del puerto USB ó de manera autónoma leyendo en la pantalla los datos que le carguemos mediante la tarjeta SD. Si bien las impresoras podrían funcionar desde la computadora, es importante el tener una pantalla donde visualizar la información y desde donde poder controlar la impresora, ya que esto las hace autónomas y facilita mucho las cosas.
RAMP's 1.4
La RAMP's 1.4 es el shield que le vamos a colocar a nuestro Arduino y que nos va a permitir controlar los elementos de potencia sin peligro a dañar el Arduino. Esta placa es un estandar y nos ahorra la complicación de montar todos los componentes nosotros mismos
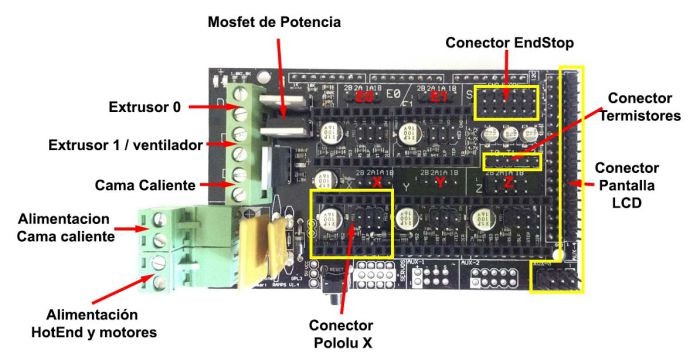
En la imagen de abajo, podrán ver de manera detallada todos los conectores y elementos que conforman la RAMP 1.4. Como elementos más destacados, podemos ver que hay espacio para 5 Pololus (driver's que gestionaran la potencia que se le entrega a los motores paso a paso), 3 Mosfet de potencia para calentar la cama y hasta 2 HotEnd`s, 1 conector para la pantalla LCD y los diferentes pines donde conectaremos tanto los sensores de temperatura como los finales de carrera.
Drivers de potencia (Pololu)
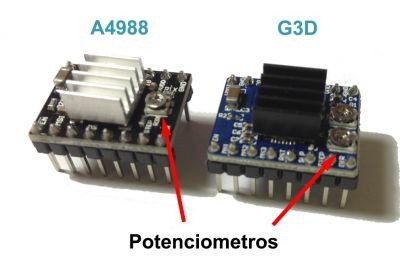
El Pololu es un driver que gestiona la potencia que se entrega al motor, este driver, va colocado directamente sobre la RAMP's, en los zocalos de la misma y regularán la corriente del motores mediante la variación del potenciómetro que tiene el mismo. (esta calibración es necesaria pero debe ser hecha por alguien con experiencia)
Existen varios modelos de pololus diferentes, aunque todos tienen la misma lógica de funcionamiento, desde el mas básico de 1 potenciómetro de regulación, basado en el integrado A4988, hasta el G3D driver que posee dos potenciómetros.
Recuerden: Si van a construir o montar una impresora, es importante aprender a calibrar estos drivers.
Motor NEMA 17
El motor NEMA 17 es el más extendido y utilizado para la creación de impresoras 3D, debido a su robustez, a que tiene fuerza más que suficiente (3.2Kg/cm) y a que es muy fácil de encontrar a buen precio.


Este motor es un motor bipolar con la capacidad de dar 200 pasos por vuelta, se conecta a través de 4 cables que dan acceso a las 2 bobinas que tiene internamente. La mayoría de estos motores usan un código de colores estándar para reconocer cada uno de los bobinados, lo normal es que los cables sean de color rojo, azul, negro y verde, correspondiendo el par (negro-verde) a una bobina y el par (rojo-azul) a la otra.
Si el motor no viene con los conectores ya preparados, y lo que trae son los cables sueltos, lo que hay que hacer es ordenarlos y ponerles un conector. El orden que seguiremos será el siguiente (Negro-Verde-Rojo-Azul), da igual el sentido en el que coloquemos estos colores, ya que luego podremos colocar el conector de una manera u de otra, lo que si debe de seguirse es esa secuencia.
Si por lo que sea, nuestros motores no tienen esos colores, deberemos identificar las bobinas del motor. Esto lo haremos midiendo con un multimetro (tester) la resistencia del bobinado, que debería de ser del orden de 2Ω, cuando las tengáis localizadas tan solo tendremos que añadirle un conector poniendo los cables de una bobina primero y los de la otra después.
Sensor de Temperatura
En la impresora, el control de la temperatura es algo fundamental, tanto para conseguir piezas con un buen acabado, como para proteger los elementos de la misma, ya que si el HotEnd que estamos utilizando tiene partes no metálicas y superamos los 250 grados, es posible que terminemos destruyéndolo.
Para realizar el control de temperatura contamos con 2 sensores, llamados termistores, uno que irá colocado en la cama caliente (Hotbed) y otro en el extremo caliente (HotEnd). La regulación de temperatura, la hace el Arduino por medio de un regulador PID que tiene programado en el Firmware y que funciona muy bien, llegando a estabilizar la temperatura con variaciones que no superan 1º arriba o abajo en el HotEnd.


El tipo de termistor que utilicemos debemos de indicarlo en el firmware, ya que existen muchos tipos diferentes y cada uno funciona de una manera, el termistor más común que podemos encontrar es el de 100k, que es el que aparece en la imagen.
Finales de carrera (EndStop)
Los finales de carrera son los elementos que van a indicar a nuestra impresora donde está el inicio de impresión, el punto 0,0,0 (home). Conociendo el punto de partida, solo hay que decirle a nuestra maquina cuanto se puede mover en cada dirección antes de salirse de los límites de impresión.

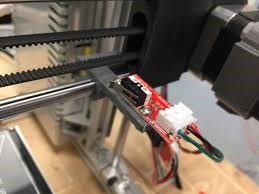
La impresora cuenta con 3 finales de carrera (uno por cada eje), estos finales de carrera pueden ser los clásicos finales de carrera mecánicos que todos conocemos o pueden venir formando parte de una placa (como podemos ver en las imágenes), u otros de tipo óptico o inductivo, cualquiera que usemos va a funcionar exactamente igual, la única diferencia va a llegar a la hora de fijarlos a la impresora y de configurarlos en el Firmware
Otra cosa que hay que tener en cuenta con los finales de carrera es la forma de trabajar con ellos, hay dos posibilidades, trabajar con ellos en la posición "normalmente abiertos" (en reposo, el circuito permanecerá abierto) y en la posición "normalmente cerrados" (en reposo, el circuito permanece cerrado).
Normalmente se los utiliza finales de carrera en "normalmente cerrados", ya que , aunque se puede trabajar de las dos formas, esto hace que si el circuito se abre por cualquier motivo (un cable cortado, por ejemplo), la impresora se detendrá. Sin embargo, habrá que configurar por firmware el modo de funcionamiento.
Extrusor Y Hotend
El conjunto de extrusor+hotend configura la parte que aporta el material y lo funde
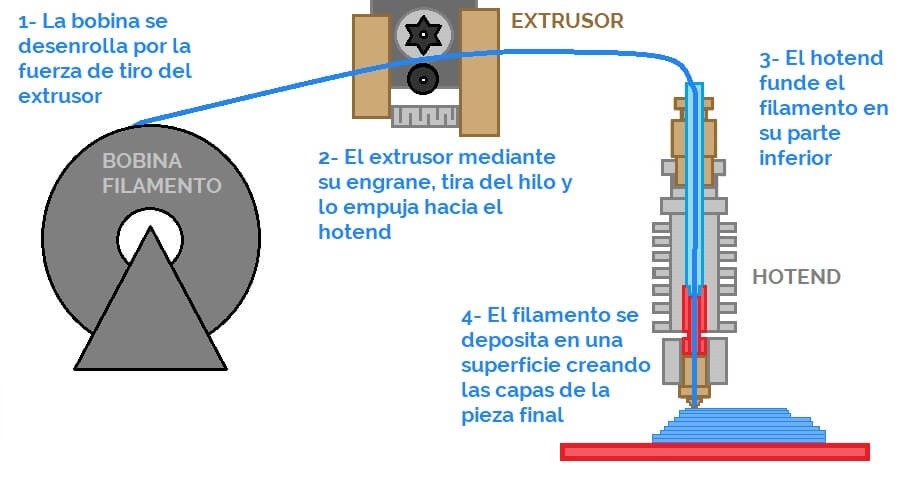
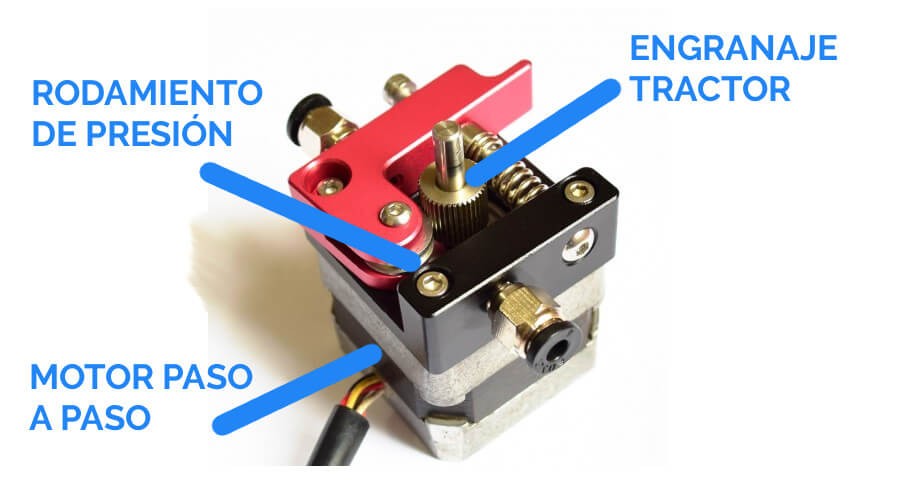
La función principal del extrusor es desplazar el filamento desde la bobina hasta el HotEnd de la manera más precisa y a la velocidad adecuada para la impresión 3D.
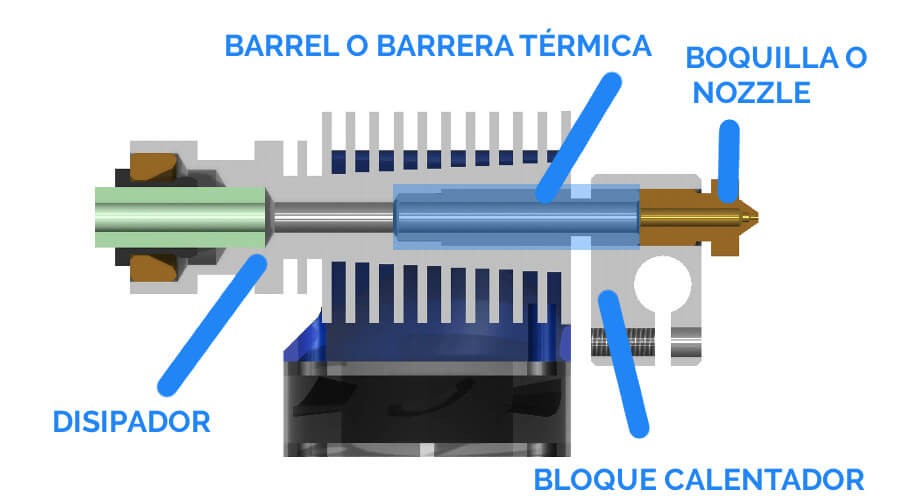
El HotEnd es el encargado de fundir el filamento para poder realizar la pieza deseada.
Existen diferentes clasificaciones de los extrusores, pero principalmente los dividiremos entre extrusor tipo directo o tipo indirecto (Bowden).
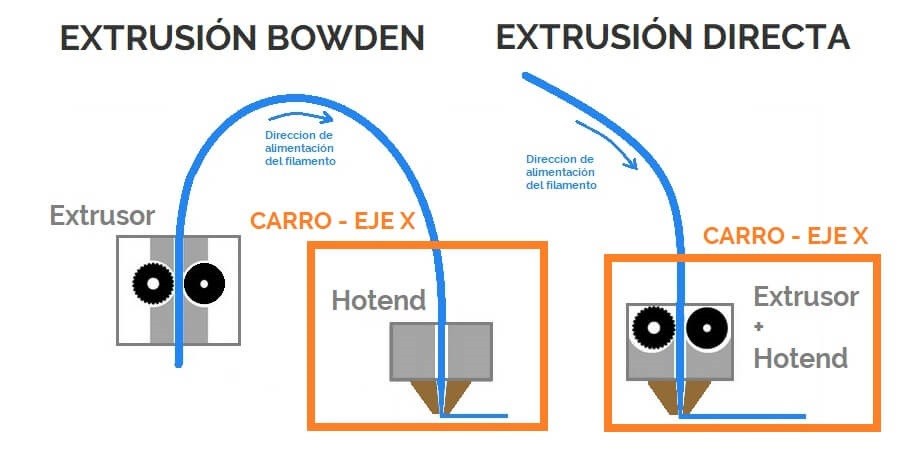
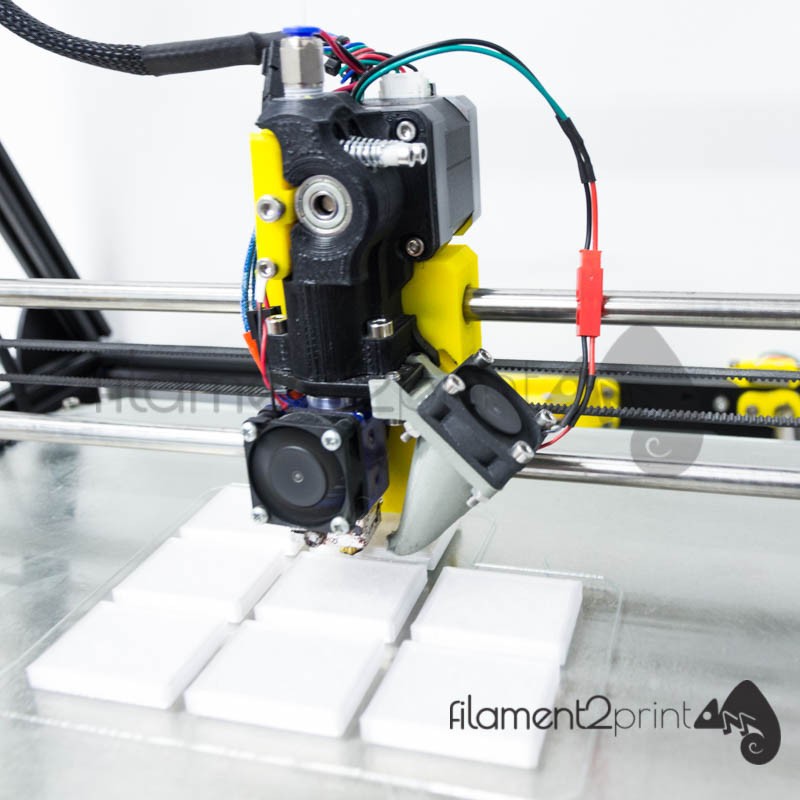
En el extrusor directo, el extrusor y el hotend conforman un cuerpo, que esta montado en el cabezal movil de la impresora, esto tiene la ventaja de que el filamento se empuja desde muy cerca del hotend y la desventaja de agregar mucho peso al cabezal, y por lo tanto tendrá mas inercia y se lograran menores velocidades de impresión.

En el caso del sistema indirecto, el extrusor va montado en una parte fija de la impresora y desde él hasta el hotend hay una tubería de teflon a través de la cual se desliza el filamento. Esto conlleva mayor rozamiento y puede producir atascos del filamento dentro del tubo.

También es posible montar varios extrusores (mas de uno en una maquina) de modo de poder disponer dos o mas filamentos y seleccionar cual queremos utilizar a cada momento de nuestra impresión.
Otra posibilidad mas avanzada, es montar hotends o extrusores múltiples, con los que podemos lograr una variedad de colores realizando mezcla de filamentos.

Extrusor Triple
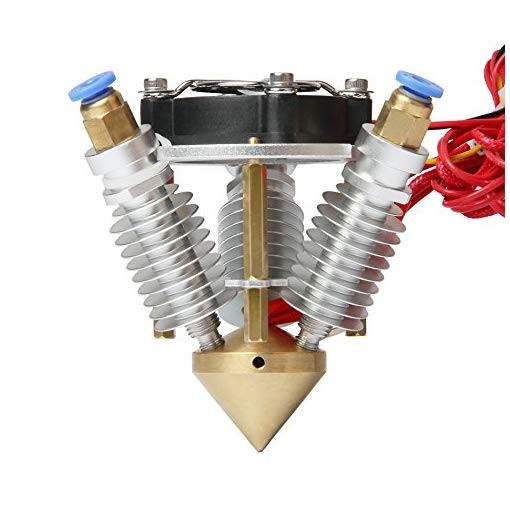
Hotend Triple